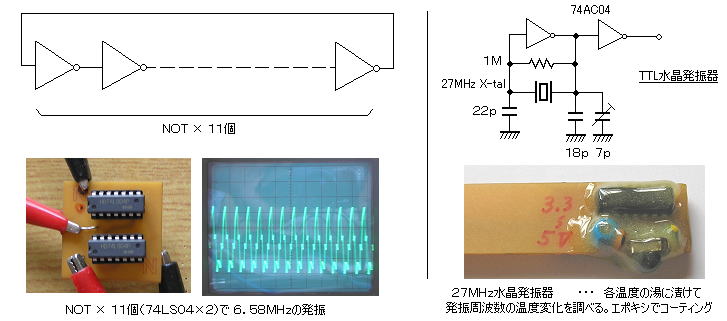
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂廃攇悢僇僂儞僞乕偺惛搙傾僢僾乮俁乯
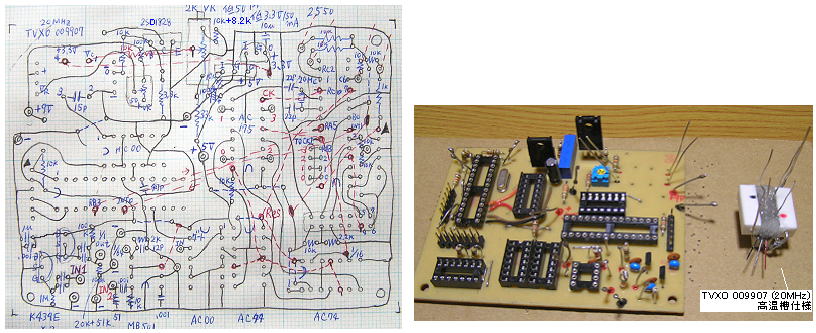
丂丂俆丏丂俧俹俽峑惓婍乮俀俽僞僀僾乯偺嶌惉丗
丂丂俧俹俽庴怣儌僕儏乕儖偐傜偺俹俹俽侾昩怣崋偼惓妋偱偼偁傞偑丄偦偺傑傑偱偼埖偄偵偔偄偺偱丄乮寁應偵偼攞偺帪娫偑偐偐傞偑丄乯 俢亅俥俥乮特咛郫踢乯 傪捠偟偰 侾昩偍偒偵岎屳偵 俀昩怣崋傪弌椡偝偣丄偦傟偧傟 俿俿俴僎乕僩偲 儅僀僐儞偺俬俶俿妱崬傒偵梡偄傞偙偲偵偟偨丅 寁應偡傞怣崋偼丄俁侽俵俫倸偔傜偄傑偱應掕偱偒傞傛偆偵 俢亅俥俥傪俀偮捠偟偰 侾/係暘廃偟偨丅
丂丂偙傟偵傛偭偰丄僎乕僩偱堦扷巭傔傞偨傔 僉儍僾僠儍乕帪娫偺偢傟偵傛傞傆傜偮偒偑彮側偔側偭偰乮俉寘栚偺儮亖亇侾掱搙乯壛嶼偟偨抣偺惛搙偑旘桇揑偵忋偑傝丄傑偨丄屻偱曗惓偡傞昁梫傕柍偔側偭偨丅
丂丂傑偨丄崅惛搙揹埑壜曄宆悈徎敪怳婍乮俿俠倁俠倃俷丄俀侽俵俫倸乯偱嬱摦偡傞偲摨帪偵丄儅僀僐儞偐傜偺俹倂俵怣崋傪暯妸偟偰 倁們乮僐儞僩儘乕儖揹埑乯偵僼傿乕僪僶僢僋偟偰帺摦揑偵俀侽丏侽侽侽侽侽侽俵俫倸偵挷惍偡傞丄婎弨敪怳婍偲偟偰偺婡擻傕晅偗壛偊偨丅偙傟偼偦偺傑傑懠偺廃攇悢僇僂儞僞乕偺峑惓偵梡偄傞偙偲偑偱偒丄儅僀僐儞梫場偺昞帵偺傆傜偮偒偲柍娭學側偺偱 曋棙偱偁傞丅
丂丂乮仏丂俧俹俽庴怣儌僕儏乕儖乮俧俵亅俁侾俇乯偼巚偭偨傛傝崅姶搙偱丄偦偺傑傑偱傕栘憿堦尙壠偺俀奒側傜偽幒撪偐傜侾侽悢暘偱塹惎傪懆偊傞偙偲偑偱偒偨丅侾/係兩亊俀偺僟僀億乕儖俙俶俿乮俿帤宆乯傪晅偗傞偲丄幒撪偱俀乣俁暘偱懆偊傞丅乯
丂丂
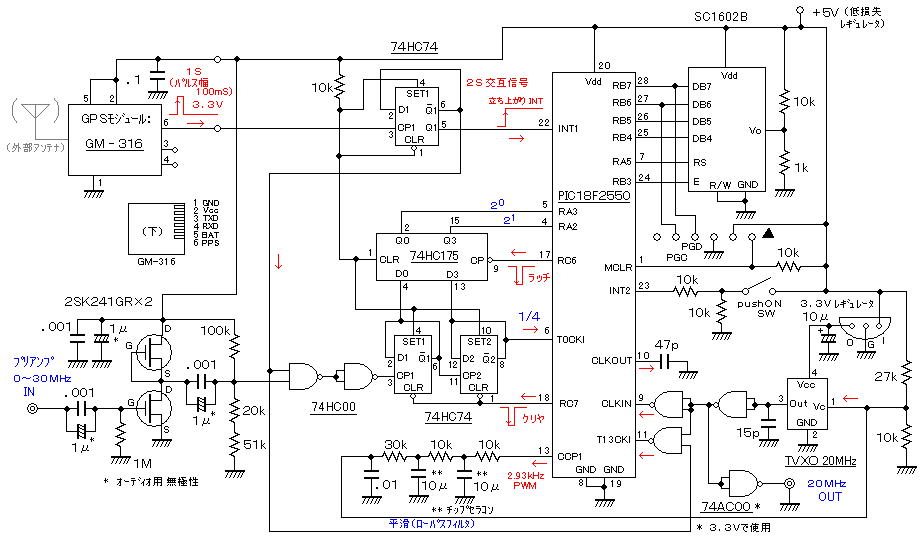
丂丂婡擻侾偺 廃攇悢應掕婍偼丄俈係俫俠俈係乮俢亅俥俥乯偵傛傝 俧俹俽偺侾昩僷儖僗傪侾昩娫妘偛偲偺俀昩廃婜偺曽宍攇偵偟偰丄/俻怣崋傪 擖椡怣崋僎乕僩偲 僼傿乕僪僶僢僋梡偺僎乕僩偵丄俻怣崋傪 俹俬俠侾俉俥俀俆俆侽偺俬俶俿侾偵 偦傟偧傟擖傟偨丅俬俶俿偼攇宍偺棫偪忋偑傝偱斀墳偡傞丅
丂丂擖椡怣崋偺僎乕僩俷俶/俷俥俥憖嶌偼丄僞僀儈儞僌挷惍梡偺懠偺儅僀僐儞傪摿偵梡堄偟偰偄側偄偺偱丄俿俿俴僎乕僩偲 儅僀僐儞撪偺俿俵俼侽偺俷俶/俷俥俥偼 庒姳偢傟丄昞帵偼俉寘栚偑儮亖亇侾傎偳傆傜偮偔丅偙偺傆傜偮偒偼丄廃婜偑抁偔 彫偝偄偺偱丄侾侽侽夞掱搙偺暯嬒壔張棟乮憤榓偟偰昞帵寘傪偢傜偡乯偵傛偭偰媫懍偵廂懇偟丄俋乣侾侽寘傑偱偼埨掕揑偵寛掕偡傞偙偲偑偱偒傞丅乮慜夞偺楢懕寁應曽幃偼俉寘偑傗偭偲乯丂偙偺 儅僀僐儞梫場偺傆傜偮偒傪梷偊傞偨傔偵偼丄傢偞傢偞僞僀儈儞僌挷惍偺偨傔偩偗偵俹俬俠侾俉俥俀俆俆侽側偳偺摨偠俀侽俵俫倸敪怳丄侾俀俵俫倸摦嶌偺儅僀僐儞傪侾屄捛壛偟側偗傟偽側傜側偄丅
丂丂俧俹俽怣崋偺惛搙偼傕偲傛傝丄俢亅俥俥偱枅夞惓妋偵侾昩偛偲偵愗傜傟偰偄傞偐偑惛搙乮拞怱抣乯偺億僀儞僩偲側傞偑丄偙傟偼妋擣偺偟傛偆偑柍偄丅偄偢傟丄儖價僕僂儉廃攇悢僇僂儞僞乕側偳傪儗儞僞儖偟偰丄偙偺峑惓婍傪峑惓偡傞偟偐側偄偲巚傢傟傞丅
丂丂婡擻俀偺 婎弨怣崋敪惗婍偼丄俠俠俹侾儌僕儏乕儖傛傝俹倂俵怣崋傪弌偟 暯妸偟偰丄掞峈暘妱偟偨揹埑偵廳忯偟丄俿倁倃俷乮俀侽俵俫倸乯偺 倁們偵僼傿乕僪僶僢僋偡傞丅乮俁丏俁倁揹尮偐傜暘妱揹埑傪偲傞偲丄僎乕僩俷俶/俷俥俥枅偵揹埑偑曄摦偡傞偺偱丄俆倁偐傜偲偭偨乯丂俿倁倃俷偐傜偺弌椡偼丄俿侾俁俠俲俬乮侾侾倫倝値乯偵擖傟丄僞僀儅侾偱僇僂儞僩偟偨憤榓偑 20000000乮亖20M乯傛傝戝偒偄偐彫偝偄偐偱丄俹倂俵怣崋偺僨儏乕僥傿乕斾傪侾夞偺妱崬傒偵偮偒侾偮偩偗憹尭偟偰僐儞僩儘乕儖偡傞丅 偙偺僞僀儅侾偺擖椡偼 僞僀儅侽偲堎側傝丄廃攇悢偺忋尷偑廫暘崅偄偺偱丄僞僀儅侾偺僾儕僗働乕儔乕偼侾/侾偱巊偆偙偲偑偱偒傞丅乮仏 俹俬俠侾俉偱偼丄俿侾俷俽俬 偵擖傟傞偲丄俹倂俵儌乕僪偲 僐儞儁傾/僉儍僾僠儍儌乕僪偲偑椉棫偟側偄偺偱晄壜乯
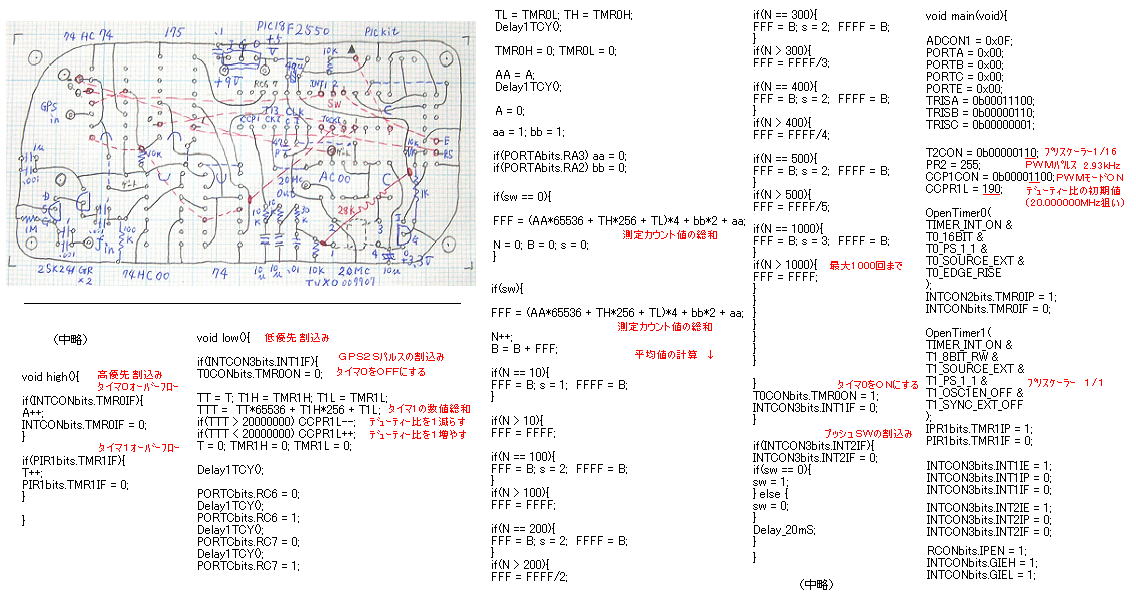
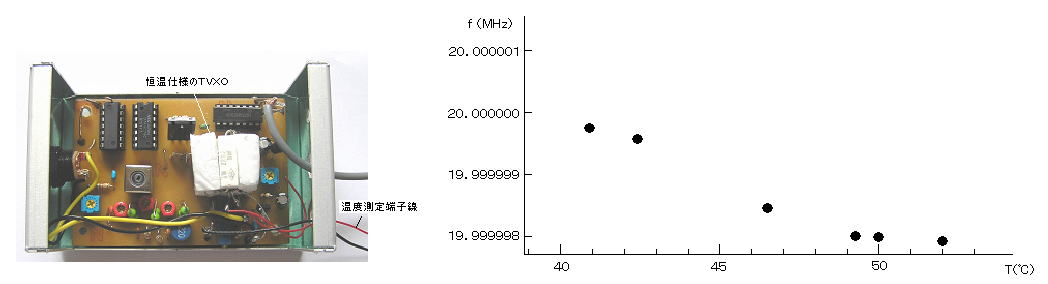
丂丂幚嵺偺偲偙傠丄偙偺俿倁倃俷乮TVXO009907丄俀侽俵俫倸丄塸崙惢丗 峸擖丒俼俽狠芜叭萋乯偼丄慜夞偵巊梡偟偨摨幮偺侾俀丏俉俵俫倸昳傛傝傕偼傞偐偵壏搙曄摦偑彮側偔丄峆壏憛柍偟偱丄 俉寘栚偑 侾乣俀掱搙偟偐曄壔偟側偐偭偨丅乮師崁偺僌儔僼丂伀乯丂 偨傔偟偵丄20000010丄19999990 偵愝掕偡傞偲丄慜婰偺儐僯僶乕僒儖廃攇悢僇僂儞僞乕偵傛傞應掕偱丄俁侽昩埲撪偱 偦傟偧傟丄20000010丄19999990 偵廂懇偡傞偺傪妋擣偟偨丅偙偺夞楬偺応崌丄僷儖僗暆 俹俼俀亖俀俆俆偵懳偟丄僨儏乕僥傿乕斾 俠俠俹俼侾俴亖侽乣俀俆俆偱怳偭偰丄帺摦挷惍偺斖埻偼 19.999914乣20.000036MHz 偩偭偨丅偙傟偐傜奜傟傞偲 帺摦挷惍偼偱偒側偔側傞丅偟偨偑偭偰丄暘夝擻偼 侾俀俀/俀俆俇 亖 侽丏係俈俈乮俉寘栚乯偱丄俉寘栚傪挷惍偡傞偵偼廫暘偱偁傞丅
丂丂仠丂僜乕僗丗
丂丂俧俹俽俀俽僞僀僾峑惓婍偼丄師崁偺俀侽俵俫倸埨掕壔敪怳婍偲丄慜夞嶌惉偟偨 儐僯僶乕僒儖廃攇悢僇僂儞僞乕偲嫟偵梡偄偰巊梡偟偨丅
丂

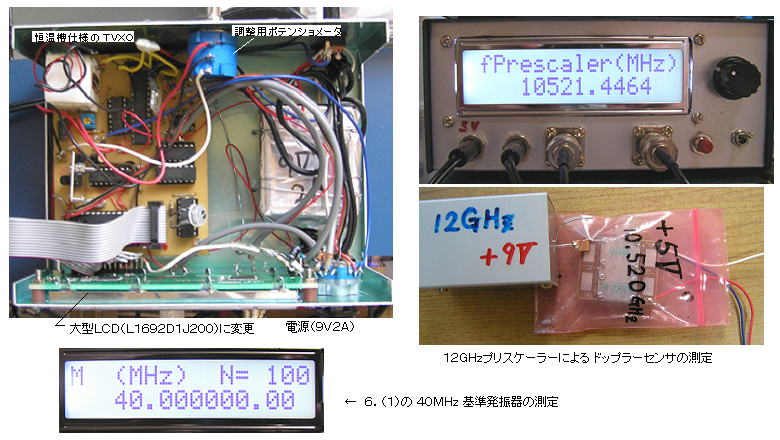
丂丂乮捛婰乯丂儐僯僶乕僒儖廃攇悢僇僂儞僞乕乮俀儅僀僐儞曽幃乮PIC18F2550 亊俀乯丄俿倁倃俷乮俀侽俵俫倸丄TVXO009907丄亇侽丏俋倫倫倣乯丄侾/侾擖椡乣侾侽侽俵俫倸丄僾儕僗働乕儔乕乮乣侾俧俫倸丄俀丏係俧俫倸乮奜晹乯丄侾俀俧俫倸乮奜晹乯乯丄憤榓儃僞儞晅乮倎倲丏俀侽俵俫倸丒俉乣侾侽寘昞帵乯丄峑惓丗倐倷丏俧俹俽峑惓婍乮忋婰乯乯偺 僷僞乕儞恾傪捛壛偟傑偡丅
丂丂廃攇悢挷惍倁俼傪 俀倠兌倁俼乮懡夞揮丒墶宆乯偵曄峏乮俆倁丗 俁俁倠亅俀倠倁俼亅侾俉倠兌乯丄峆壏憛偺僙儊儞僩掞峈俀倂俀侽兌亊俁乮俋倁乯偲偟 俿亖栺係俆亷丄俹俬俠偺僺儞愙庒姳曄峏丅 敪怳梡俹俬俠侾俉俥俀俆俆侽偺摦嶌儘僗偼俹俬俠侾俉俥侾係俲俆侽傛傝傕戝偒偔丄僾儘僌儔儉偺僞僀儅乕侾妱傝崬傒偺 俶亖侾俉俁丄俿俵俼侾俫亖俀俀俋丄俿俵俼侾俴亖俁俆偲側偭偨丅
丂丂丒丂俧俹俽偑塹惎傪懆偊偨弖娫偵僙儞僞乕抣傊廂懇傪奐巒偡傞丅丂丒丒丒丒丒丂侾侽夞暯嬒乮俶亖侾侽乯亊侾侽夞偺暯嬒抣偺椺丗丂丂俧俹俽峑惓婍偺俿倁倃俷敪怳丗丂俀侽丏侽侽侽侽侽侾丏俇俈丂仺丂塹惎偺尨巕帪寁丗丂侾俋丏俋俋俋俋俋俋丏俋俀 俵俫倸丅乮俧俹俽偑塹惎傪懆偊偨偲偒丄俴俠俢偺昞帵偑乭侽乭偐傜乭侾乭偵曄傢傞丅乯丂偨偩偟 俧俹俽峑惓婍偺弌椡廃攇悢偺屄暿偺悢抣偺傆傜偮偒偼丄侾俫倸偺曄摦偛偲偵僨儏乕僥傿乕斾傪惂屼偡傞曽幃偺偨傔丄儮亖亇侽丏俆俫倸掱搙傪尒偰偍偔丅
丂丂乮仏丂侽丏侾俫倸偛偲偵僨儏乕僥傿乕斾傪惂屼偡傞乮儮亖亇侽丏侽俆俫倸乯偵偼丄俀侽昩娫乮侾侽夞暘乯悢偊偨抣偲 200000000 偺斾妑偱憹尭偡傞丅廂懇帪娫偼侾侽攞偐偐傞丅乯
丂丂
丂丂丂乮捛婰丂2021 6乯丂丂俴俠俢偺戝宆壔丂乮俴侾俇俋俀俢侾俰俀侽侽乯丗
丂丂摨偠婎斅偺傑傑偱丂俴侾俇俋俀俢侾俰俀侽侽丂偵曄偊傞偨傔偵丄丂倁倱倱偲倁倓倓偺僺儞媡丄丂lcd 弶婜壔丄偍傛傃丄孞傝曉偟昞帵偺帪娫揑梋桾傪廫暘偲傞乮僾儘僌儔儉乯丄丂僐儞僩儔僗僩倁倢們偼侾侽倠丗俆侽侽兌偲偐側傝壓懁丄丂僶僢僋儔僀僩偼掅傔偵侾侽侽兌偲偟侾俋倣俙丅丂俿倁倃俷偺倁們偼丄亄俆倁傪丂俁俁倠丂亅丂俀倠億僥儞僔儑儊乕僞丂亅丂俀侽倠丂偱暘妱偟偨丅丂乮慡揹棳丗丂俋倁侽丏俀俆俙乯
丂
丂丂俇丏丂婎弨敪怳婍丄崅廃攇傾儞僾偺嶌惉丗
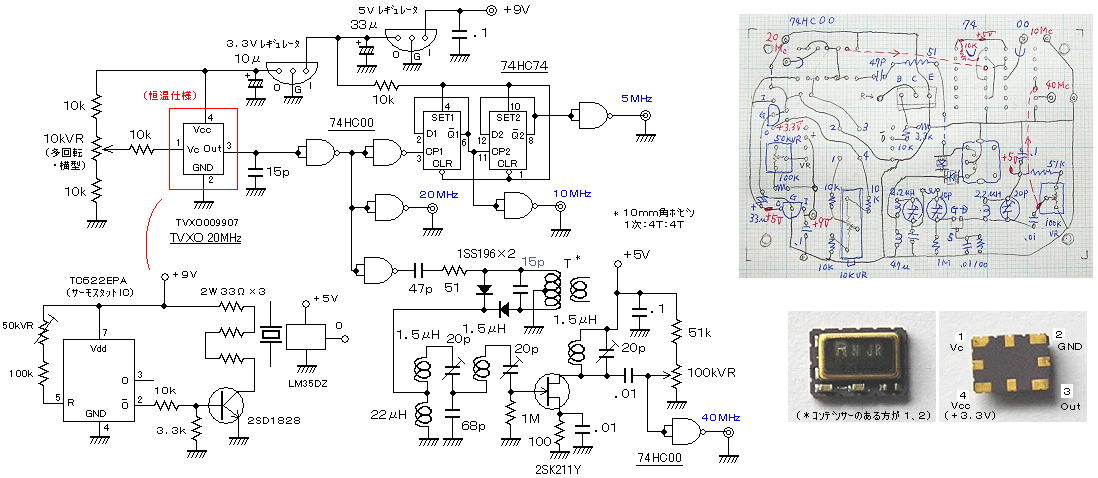
丂丂乮侾乯丂俿俠倁俠倃俷偵傛傞埨掕廃攇悢敪怳婍丗
丂丂偙傟偼丄慜夞 儐僯僶乕僒儖廃攇悢僇僂儞僞乕偺敪怳尮偲偟偰嶌惉偟偨傕偺偲摨偠偱偁傞偑丄俀侽俵俫倸偺俿倁倃俷乮TVXO009907丄塸崙惢乮丒丒丒棤懁偺柾條偑乭儐僯僆儞僕儍僢僋乭丠乯乯偺壏搙摿惈偑旕忢偵椙偄偺偱丄僣乕儖偲偟偰摿偵嶌惉偟偨丅廃攇悢偺 壏搙偵懳偡傞埨掕搙偼丄侾侽亷偺壏搙嵎偱 俉寘栚偑傢偢偐俀 偟偐曄壔偟側偄偲偄偆桪傟傕偺偱偁傞丅乮儮倖 /儮俿 亖 亅俀亊侾侽-9 倎倲丏係侽乣俆俀亷丄 僌儔僼 伀乯
丂丂壏搙愝掕偼丄堦弿偵杽傔崬傫偩俴俵俁俆俢倅偵傛傞悢抣偱係侾亷偵愝掕偟偨偑丄偐側傝峀偄斖埻偱偳偙偱傕椙偔丄応崌偵傛偭偰偼敪擬懱偩偗偱僒乕儌僗僞僢僩偝偊傕昁梫側偄偲巚傢傟傞丅
丂丂僙儞僞乕抣偺峑惓偼丄忋婰偺 俧俹俽峑惓婍乮俀俽僞僀僾乯偱應掕偟偰峴偄丄墶偵晅偗偨挷惍寠偐傜懡夞揮倁俼傪夞偟偰 奜晹偐傜倁們乮僐儞僩儘乕儖揹埑乯傪挷惍偟偨丅
丂丂弌椡偺俀侽俵俫倸偼丄俈係俫俠俈係偱暘廃偟偰 侾侽俵俫倸丄俆俵俫倸 傪丄傑偨丄俀偰偄攞夞楬乮挻崅懍僗僀僢僠儞僌僟僀僆乕僪乮1SS196丄倲倰r = 1.6nS乯曽幃乯偵傛偭偰 係侽俵俫倸傪丄偦傟偧傟弌椡偱偒傞傛偆偵偟偨丅
丂丂丂乮乮捛婰乯丂俿倁倃俷夞楬偺侾侽倠兌倁俼傪 俀倠兌倁俼偵曄峏偟偰 挷惍偟傗偡偔側偭偨丂伀丂乯
丂
丂丂
丂丂乮俀乯丂倀俫俥懷 壜曄敪怳婍丗
丂丂俁侽侽俵俫倸埲忋偺倀俫俥懷偺怣崋尮偲偟偰丄惛搙偼椙偔側偄乮俆寘偔傜偄乯偑丄廃攇悢壜曄宆偺婛惢偺僆僔儗乕僞乕偱娙扨偵僥僗僩怣崋尮傪嶌傞偙偲偑偱偒傞丅丂俹俷俽亅俆俁俆乮Mini-Circuits惢乯偼丄倁俠倃俷偲摨條偵 惂屼梡揹埑 倁TUNE 傪 侾乣侾俇倁偺斖埻偱偐偗傞偲丄俁侽侽俵乣俆俀俆俵俫倸乮幚幙丄俀俁俇俵乣俆俇侽俵俫倸乯偺峀偄斖埻偺 倀俫俥懷偺怣崋傪敪惗偡傞丅乮弌椡丗亄俉丏俉倓俛倣丄弌椡僀儞僺乕僟儞僗俆侽兌丄揹尮侾俀倁丒俀侽倣俙丄丂仏 撪晹峔憿偼 俿倁倃俷偵傛傞尨敪怳傪丄俹俴俴曽幃偵傛偭偰孞傝曉偟掽攞偟偰偄傞偲巚傢傟丄偦偺暘惛搙偼埆偔側傞乯
丂丂崅廃攇側偺偱丄嶌惉偵偁偨偭偰偼丄傾乕僗傪廫暘庢傝丄俼俥 俷倀俿抂巕偼 婎斅傪愗傝寚偒業弌偝偣丄嬌椡抁偔俛俶俠僐僱僋僞偲寢傃丄偦傟埲奜偼僀儞僟僋僞傪捠偟偰嫙媼偡傞丅 揹尮偑丄栺俀俀倁丄侾俇倁丄侾俀倁偺俁偮梫傞偺偱拲堄丅
丂丂廃攇悢傪埨掕偝偣傞偨傔偵偼 倁TUNE 乮倣倎倶侾俇倁乯傪埨掕偝偣傞昁梫偑偁傝丄嵟弶 侾俇倁侽丏俀俙偺僩儔儞僗偱傗偭偰傒偨偑丄峆壏憛偺僸乕僞乕偑俷俶偵側傞偲 倁TUNE 偺揹埑崀壓偑婲傝 廃攇悢偑戝偒偔曄摦偡傞偺偱丄寢嬊丄俀係倁偺傾僟僾僞乕傪巊梡偟偨丅
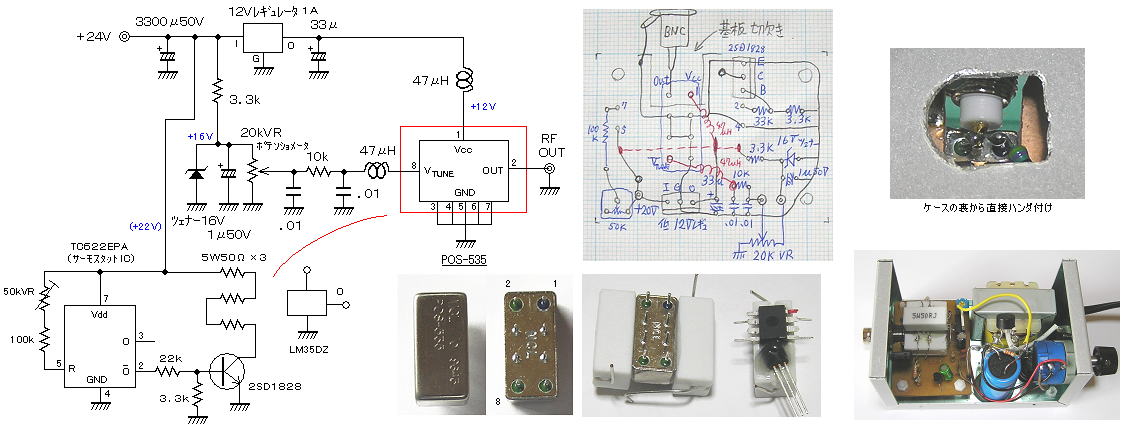
丂丂僾儕僗働乕儔乕偼丄俵俛俆侽侾乮侾侽俵 乣 侾侾侽侽俵俫倸丄侾/俇係丄 俆倁乯傪巊梡偟偰丄捈寢偟偰傕丄亅俁倓俛偺傾僢僥僱乕僞乕乮兾帤宆丗 俁侽侽亅侾俉亅俁侽侽兌乯傪晅偗偰傕丄僾儕僗働乕儔乕儗儞僕偱栤戣側偔僇僂儞僩偟偨丅 乮們倖丏 侾/侾僗僩儗乕僩儗儞僕乮僾儕僗働乕儔乕柍偟偺捠忢偺儗儞僕乯偱偼丄擖椡傪 俿俿俴 僎乕僩偺僗儗僔儂乕儖僪儗儀儖偵挷惍偟偰丄侽 乣 栺侾侾侽俵俫倸傑偱偵側傞丅乯
丂丂

丂丂乮俁乯丂俼俥傾儞僾偲 儗僢僿儖慄偺幚尡丗
丂丂倀俫俥敪怳婍傪嶌惉偟偨偺偱丄偙偺弌椡傪憹暆偡傞傾儞僾傪嶌傝丄廃攇悢僇僂儞僞乕乮僾儕僗働乕儔乕丒儗儞僕乯偲摨帪偵偮側偘側偑傜丄儗僢僿儖慄偺幚尡傪偟偨丅
丂丂嘆丂俵俙俼亅俉俙俽俵乮乣侾丏俆俧俫倸丄弌椡 俹倧丗亄侾俀丏俆倓俛倣乮亖侾侽12.5/10 亖 侾俈丏俈倣倂乯丒俧亖俀俆倓俛 倎倲丏侾俧俫倸丄揹尮揹棳俁俈倣俙乯丗丂俼倐乮僶僀傾僗掞峈乯傪揹尮揹埑偲崌傢偣傞僞僀僾偺崅廃攇俬俠偱丄幚尡梡偺庤偛傠側儗儀儖偺弌椡傪庢傝弌偡偙偲偑偱偒傞丅俼倐偺俀俀侽兌偼敪擬偡傞偺偱 侾/俀倂巊梡丅 婎斅偼椉柺僈儔僗僄億僉僔傪梡偄偨乮棤柺偼儀僞 傾乕僗乯丅
丂丂儗僢僿儖慄偵偼丄倓 亖冇侾丏俀倣倣僗僘儊僢僉慄傪丄娫妘 俢亖俆們倣偱暯峴偵俀杮挘傝 挿偝 栺侾倣偲偟偨丅僶儔儞偺姫偒慄斾偼 侾丗俁乮俀俿丗俇俿乯偲偟偰 僀儞僺乕僟儞僗斾偼 侾丗俋偲側傝丄慄偺僀儞僺乕僟儞僗偼 俆侽兌亊俋亖係俆侽兌丄 俢/倓 亖 侾侽450/277 亖 係俀丏侾俈 偲側傞丅乮暯峴俀慄偺僀儞僺乕僟儞僗 倅0 亖 俀俈俈倢倧倗乮俢/倓乯傛傝乯
丂丂乮仏丂儗僢僿儖慄偼丄傾儖儈僷僀僾偱嶌偭偰傕椙偄丅偙偺応崌丄姫偒慄斾偼 侾丗俀偔傜偄丅丂儗僢僿儖慄傪侾俉侽搙偵峀偘傞偲 僟僀億乕儖傾儞僥僫偵側傞丅乯
丂丂僐傾嵽偵偼丄倀俫俥 俿倁梡偺儊僈僱僐傾偑柍偐偭偨偺偱 俥俿俆侽亅俇俈 乮乣俀侽侽俵俫倸乯傪巊梡偟偨偑丄揱憲壜擻側廃攇悢偼 栺係侽侽俵俫倸傑偱偱丄俆侽侽俵俫倸偼弌椡偑掅偡偓偰柧椖偵應掕偱偒側偐偭偨丅
丂丂専弌梡偺惍棳婍偵偼丄侾俽俽侾俆係乮僔儑僢僩僉乕丄倀俫俥乣俽僶儞僪丄倣倎倶俁侽倣俙俇倁乯傪梡偄偨丅
丂
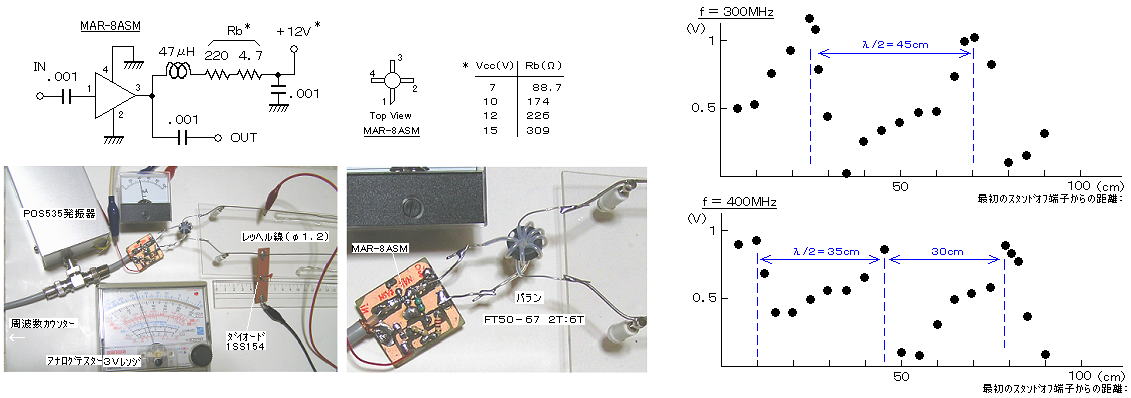
丂丂嘇丂兪俹俠侾俇俈俈俠乮侾侽侽俵俫倸乣侾丏俉俧俫倸丄弌椡 俹倧丗亄侾俋倓俛倣乮亖俉侽倣倂丄侽丏俆俧俫倸偱嵟戝弌椡丄擖椡俹倝丗亄俁倓俛倣乮亖俀倣倂乯丄揹尮俆倁丒俈俆倣俙乯丗丂俢俬俹俉倫偺懌傪怢偽偟偰捈愙僴儞僟晅偗偡傞丅 掅廃攇懁偲崅廃攇懁偺弌椡傪側傞傋偔嬒堦偵偡傞偨傔偵丄弌椡偲揹尮偺娫偵 揔摉側 嬻恈僀儞僟僋僞乮侽丏俁兪俫乯傪憓擖偡傞丅乮崅廃攇儚僯僗偱屌掕乯
丂丂俴俤俢偼丄掕忢攇偺暊偱岝傝丄愡偱偼岝傜側偄傛偆偵偡傞丅 弌椡偑傗傗嫮偄偺偱丄僶儔儞偱僀儞僺乕僟儞僗傪掅傔偵偟丄僟僀僆乕僪斅乮儀乕僋丒曅柺丄僟僀僆乕僪娫傪僇僢僩乯偺曅懁傪忔偣 俴俤俢傪揰摂偝偣偨丅乮僥僗僞偱 俁乣係倁乯
丂